Publications
A collection of my research work.
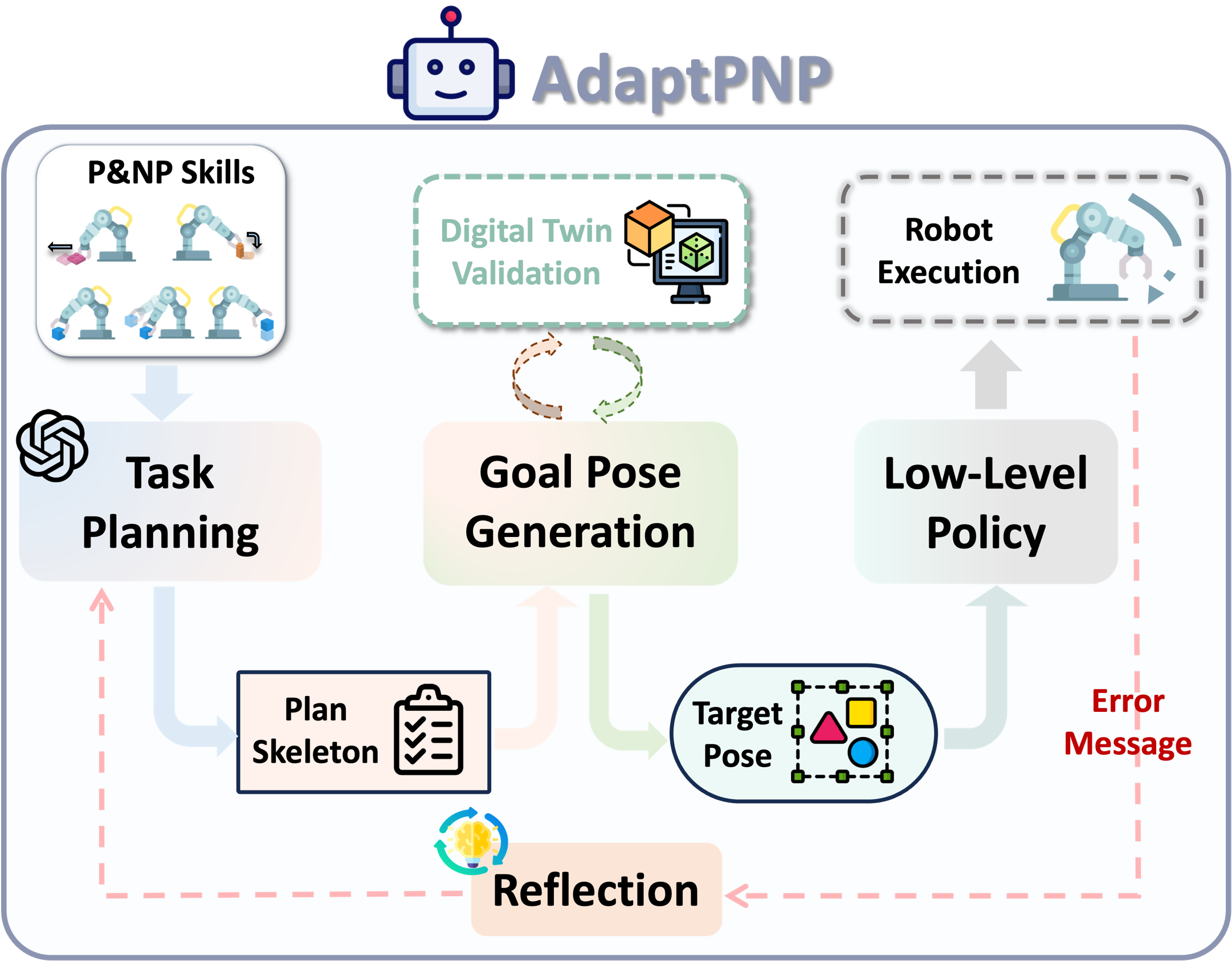
AdaptPNP: Integrating Prehensile and Non-Prehensile Skills for Adaptive Robotic Manipulation
Jinxuan Zhu†, Chenrui Tie†, Xinyi Cao†, Yuran Wang, Jingxiang Guo, Zixuan Chen, Haonan Chen, Junting Chen, Ruihai Wu, Lin Shao
IEEE International Conference on Robotics & Automation (ICRA) 2026
A vision-language model-empowered framework that adaptively selects and schedules prehensile and non-prehensile skills for various manipulation tasks.

Manual2Skill++: Connector-Aware General Robotic Assembly from Instruction Manuals via Vision-Language Models
Chenrui Tie†, Shengxiang Sun†, Yudi Lin, Yanbo Wang, Zhongrui Li, Zhouhan Zhong, Jinxuan Zhu, Yiman Pang, Haonan Chen, Junting Chen, Ruihai Wu, Lin Shao
IEEE International Conference on Robotics & Automation (ICRA) 2026
We utilizes a VLM to extract structured, connector-aware hierarchical graph representations from assembly manuals, enabling generalizable robotic assembly.
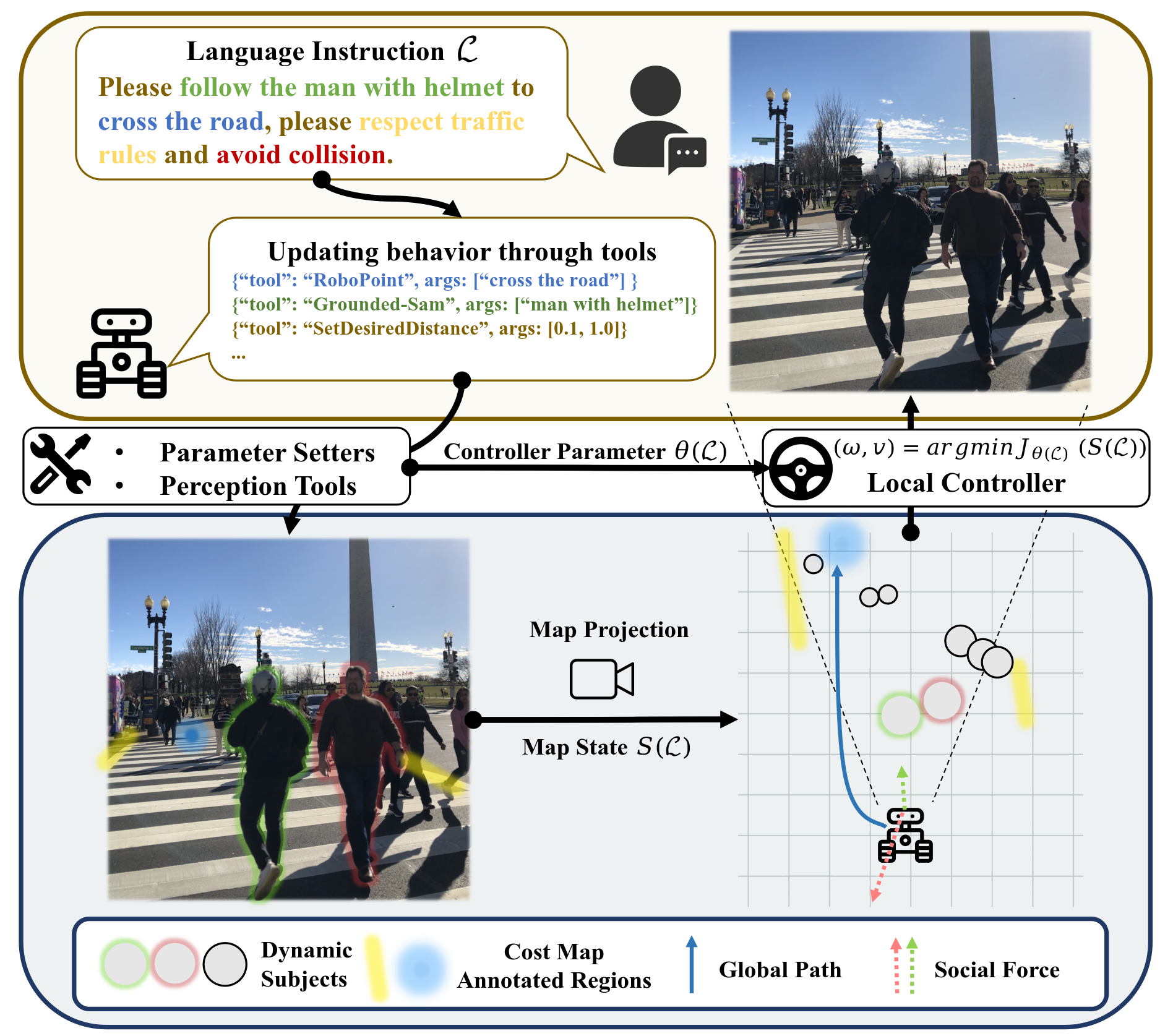
LISN: Language-Instructed Social Navigation with VLM-based Controller Modulating
Junting Chen†, Yunchuan Li†, Panfeng Jiang†, Jiacheng Du, Zixuan Chen, Chenrui Tie, Jiajun Deng, Lin Shao
IEEE International Conference on Robotics & Automation (ICRA) 2026
The first simulation benchmark to evaluate instruction following and scene understanding in social navigation. And a fast-slow hierarchy where a VLM modulates costmaps and controller parameters while the low-level controller maintains real-time safety.
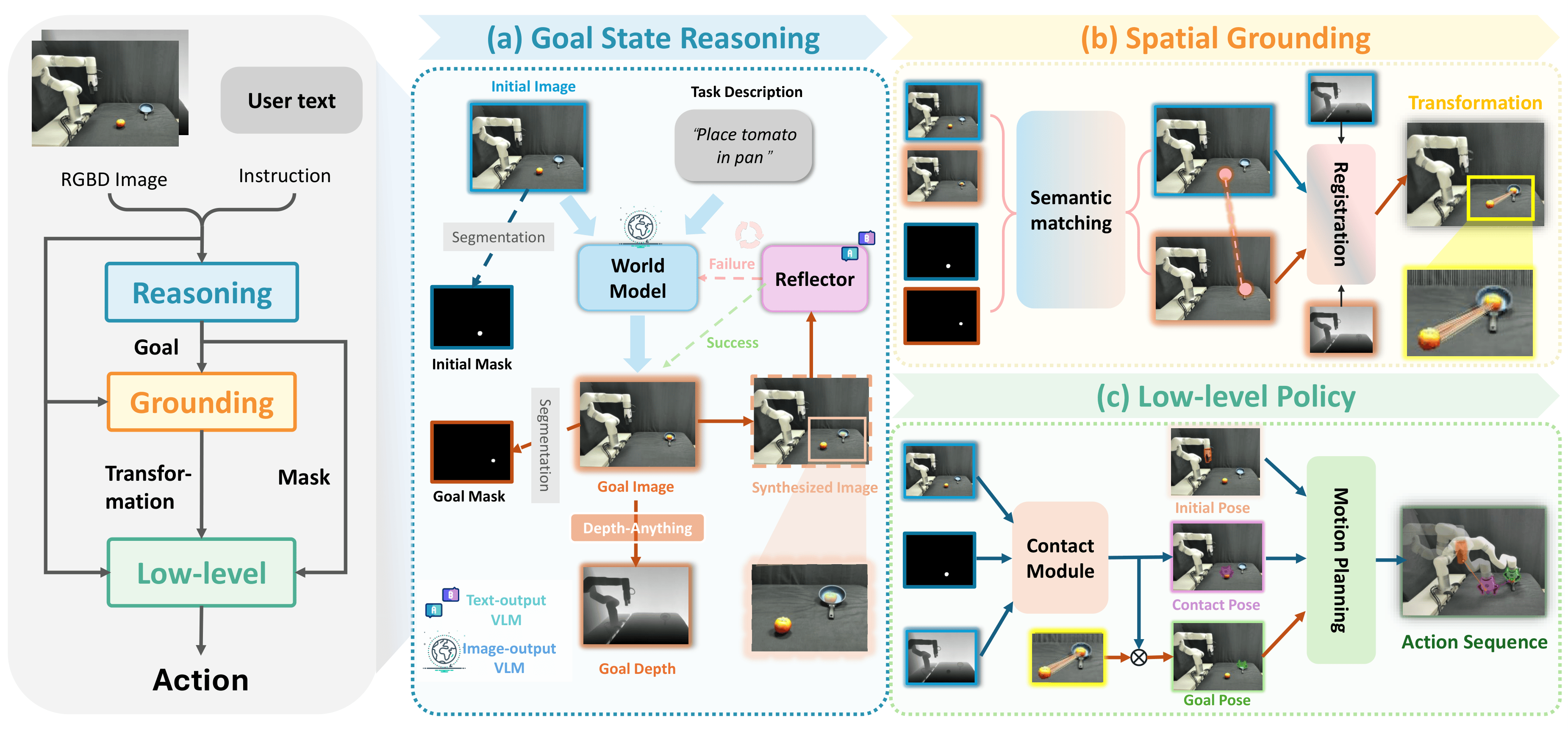
Goal-VLA: Image-Generative VLMs as Object-Centric World Models Empowering Zero-shot Robot Manipulation
Haonan Chen†, Jingxiang Guo†, Bangjun Wang, Tianrui Zhang, Xuchuan Huang, Boren Zheng, Yiwen Hou, Chenrui Tie, Jiajun Deng, Lin Shao
IEEE International Conference on Robotics & Automation (ICRA) 2026
A zero-shot framework that leverages Image-Generative VLMs as world models to generate desired goal states, enabling generalizable manipulation
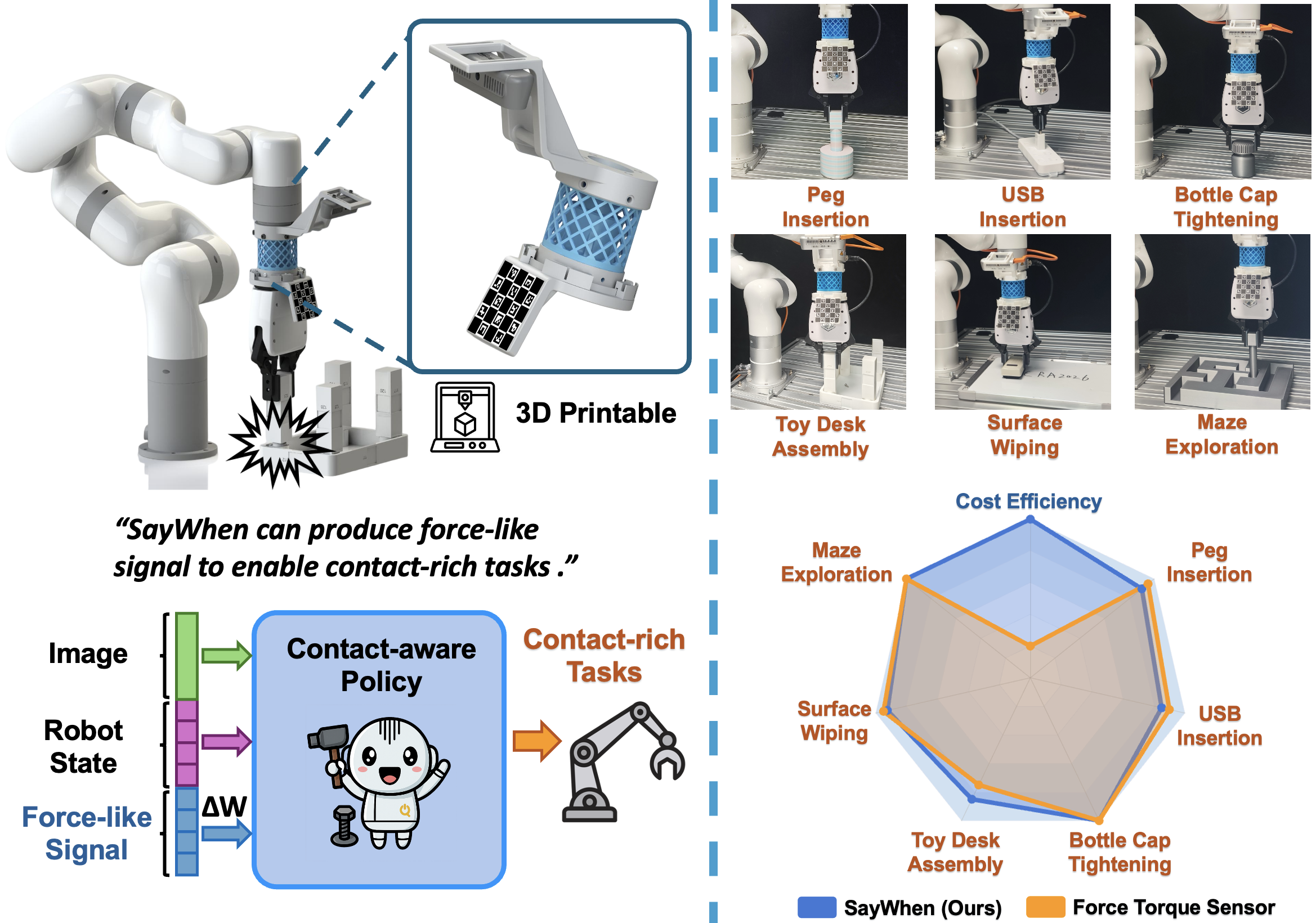
ShapeForce: Low-Cost Soft Robotic Wrist for Contact-Rich Manipulation
Jinxuan Zhu†, Zihao Yan†, Yangyu Xiao, Jingxiang Guo, Chenrui Tie, Xinyi Cao, Yuhang Zheng, Lin Shao
IEEE International Conference on Robotics & Automation (ICRA) 2026
A low-cost, plug-and-play soft wrist that provides force-like signals for contact-rich robotic manipulation.
Manual2Skill: Learning to Read Manuals and Acquire Robotic Skills for Furniture Assembly Using Vision-Language Models
Chenrui Tie†, Shengxiang Sun†, Jinxuan Zhu, Yiwei Liu, Jingxiang Guo, Yue Hu, Haonan Chen, Junting Chen, Ruihai Wu, Lin Shao
Robotics: Science and Systems (RSS) 2025
We propose a novel framework that enables VLM to understand human-designed manuals and acquire robotic skills for furniture assembly tasks.
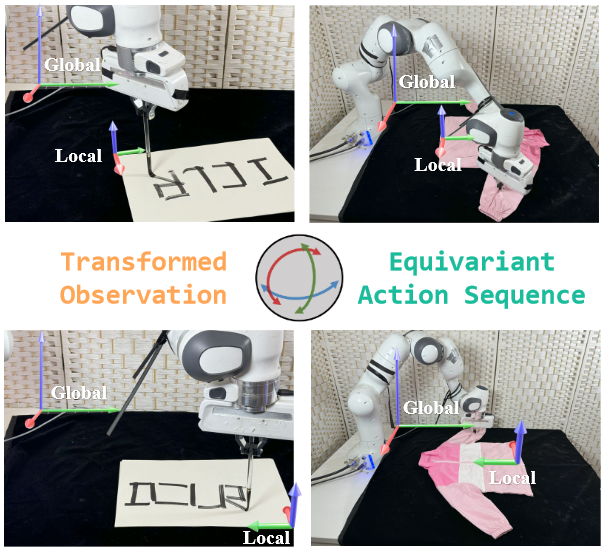
ET-SEED: Efficient Trajectory-Level SE(3) Equivariant Diffusion Policy
Chenrui Tie†, Yue Chen†, Ruihai Wu†, Boxuan Dong, Zeyi Li, Chongkai Gao†, Hao Dong†
International Conference on Learning Representations (ICLR) 2025
We propose a new diffusion policy method to tackle tasks with certain symmetry, achieving better data efficiency and spatial generalization.
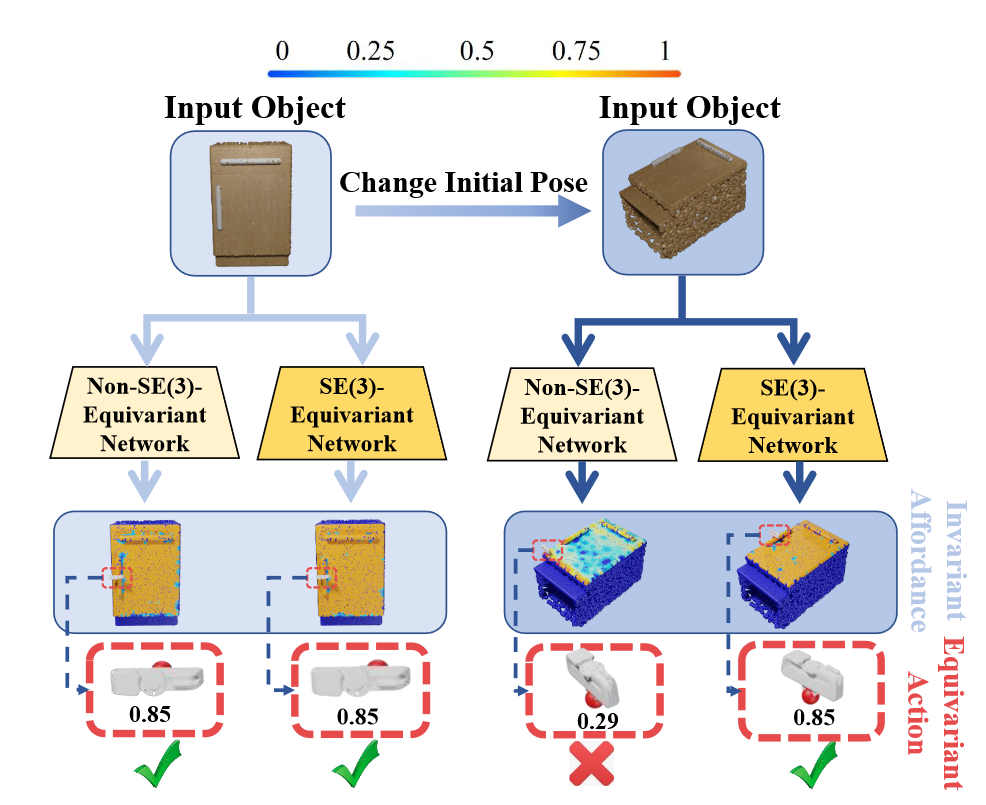
EqvAfford: SE(3) Equivariance for Point-Level Affordance Learning
Yue Chen†, Chenrui Tie†, Ruihai Wu†, Hao Dong
CVPR 2024 Workshop EquiVision 2024
We propose EqvAfford framework, with novel designs to guarantee the SE(3) equivariance in point-level affordance learning for downstream robotic manipulation.

ManiFoundation Model for General-Purpose Robotic Manipulation of Contact Synthesis with Arbitrary Objects and Robots
Zhixuan Xu†, Chongkai Gao†, Zixuan Liu†, Gang Yang†, Chenrui Tie, Haozhuo Zheng, Haoyu Zhou, Weikun Peng, Debang Wang, Tianyi Chen, Zhouliang Yu, Lin Shao
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
We Introduce a framework taking contact synthesis as a unified task representation that can generalizes over objects, robots, and manipulation tasks.
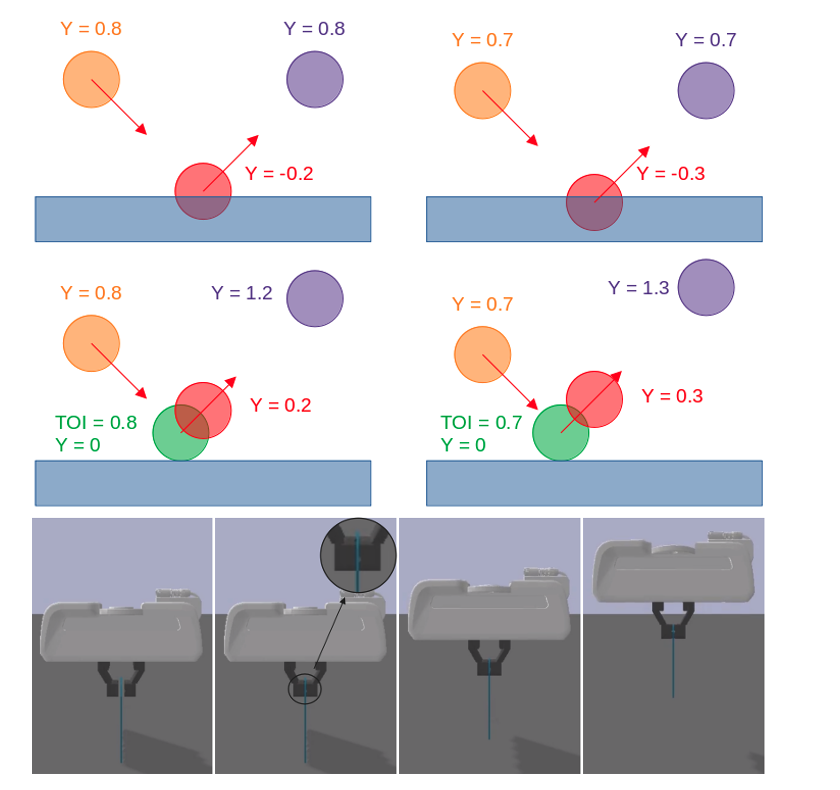
Jade: A Differentiable Physics Engine for Articulated Rigid Bodies with Intersection-Free Frictional Contact
Gang Yang, Siyuan Luo, Yunhai Feng, Zhixin Sun, Chenrui Tie, Lin Shao
IEEE International Conference on Robotics and Automation (ICRA) 2024
We developed Jade, a differentiable physics engine for articulated rigid bodies, using the continuous collision detection to prevent intersection between bodies with complex geometry shapes.
Leveraging SE(3) Equivariance for Learning 3D Geometric Shape Assembly
Ruihai Wu†, Chenrui Tie†, Yushi Du, Yan Zhao, Hao Dong
IEEE/CVF International Conference on Computer Vision (ICCV) 2023
We tackle multi-part geometrically assembly task, leveraging SE(3) equivariance and invariance, which fits the natural characteristic of the task and narrows the solution space.